Message: Return type of CI_Session_null_driver::open($save_path, $name) should either be compatible with SessionHandlerInterface::open(string $path, string $name): bool, or the #[\ReturnTypeWillChange] attribute should be used to temporarily suppress the notice
Message: Return type of CI_Session_null_driver::close() should either be compatible with SessionHandlerInterface::close(): bool, or the #[\ReturnTypeWillChange] attribute should be used to temporarily suppress the notice
Message: Return type of CI_Session_null_driver::read($session_id) should either be compatible with SessionHandlerInterface::read(string $id): string|false, or the #[\ReturnTypeWillChange] attribute should be used to temporarily suppress the notice
Message: Return type of CI_Session_null_driver::write($session_id, $session_data) should either be compatible with SessionHandlerInterface::write(string $id, string $data): bool, or the #[\ReturnTypeWillChange] attribute should be used to temporarily suppress the notice
Message: Return type of CI_Session_null_driver::destroy($session_id) should either be compatible with SessionHandlerInterface::destroy(string $id): bool, or the #[\ReturnTypeWillChange] attribute should be used to temporarily suppress the notice
Message: Return type of CI_Session_null_driver::gc($maxlifetime) should either be compatible with SessionHandlerInterface::gc(int $max_lifetime): int|false, or the #[\ReturnTypeWillChange] attribute should be used to temporarily suppress the notice
NRIPage | Articles | US Scientists 3D-Print Walking Robots Without Electronics for Just $20 Each | Get Do it Yourself DIY Articles. Create, Build, and Innovate at Home around the world - NRI Page
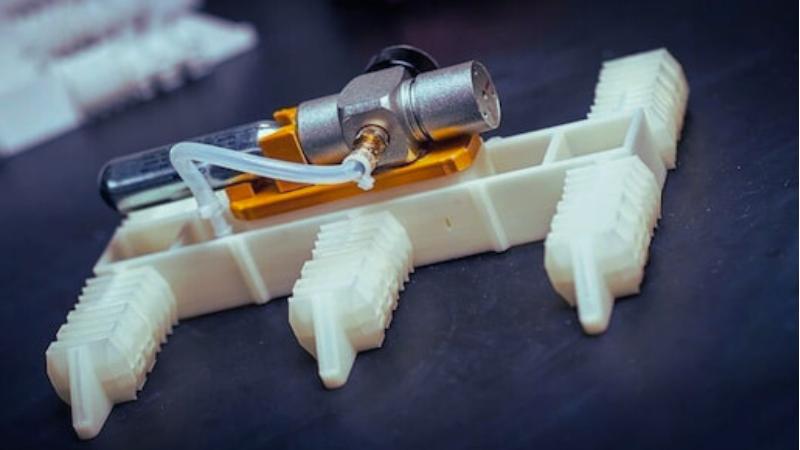
In a groundbreaking innovation that could redefine the future of robotics, researchers from the University of California San Diego have developed a six-legged robot that walks entirely without electronics, powered solely by compressed air. These robots can be produced in a single 3D-printing process using a flexible filament, meaning they can quite literally "walk off the printer" once connected to an air source. Designed to perform in environments too hazardous for traditional electronics—such as high-radiation zones, disaster areas, or even outer space—these robots are made from soft, inexpensive materials and controlled by a pneumatic system. The simplicity and robustness of their design make them an attractive option for researchers looking to deploy autonomous machines in remote or hostile environments.
The innovative walking mechanism is powered by compressed gas, eliminating the need for electronic motors or complex circuitry. Instead, the robot uses a pneumatic oscillating circuit, a system that mimics the mechanics of early steam engines, to alternately deliver bursts of air pressure to two sets of legs. Each leg features four degrees of freedom, enabling it to move up and down and forward and backward, creating coordinated movement that propels the robot forward in a straight line. According to Michael Tolley, professor at UC San Diego’s Department of Mechanical and Aerospace Engineering and senior author of the study, this approach represents a revolutionary shift in robotics. “This is a completely different way of looking at building machines,” said Tolley. “We wanted to create something that doesn’t rely on fragile electronics or complicated assembly, but is still capable of meaningful locomotion in real-world environments.”
The robot’s fabrication process is equally impressive. Each unit is made from a single type of 3D printing filament, which greatly simplifies production and cuts costs. The total material and printing cost for each robot is approximately $20—an extraordinary feat compared to the typically high expenses associated with robotic design and assembly. In laboratory tests, the robot demonstrated remarkable endurance. As long as it remained connected to a consistent source of pressurized air or gas, it was able to function continuously for up to three days. Field tests pushed the concept even further, showing that with a portable compressed gas cartridge, the robot could operate untethered. The robot successfully navigated a range of surfaces, including sand, turf, and even shallow water, showcasing its adaptability to different terrains.
The research team has big plans for the future of these soft robots. Current development goals include:
Integrating compressed gas storage directly into the robot’s body to allow full autonomy.
Using recyclable or biodegradable materials to improve environmental sustainability.
Adding manipulators, such as soft grippers or arms, to enable the robots to perform simple tasks in addition to walking.
This innovation opens up possibilities not just for emergency response and exploration missions but also for cost-effective robotics education, environmental monitoring, and scenarios where minimal infrastructure is available. As robotics continues to evolve, the development of robust, lightweight, and inexpensive walking machines like these highlights a future where mobility and resilience are engineered into the very materials—and where simplicity may unlock some of the most extraordinary capabilities.